上肢假肢的科學(xué)分類與技術(shù)演進(jìn)
上肢假肢作為彌補(bǔ)肢體功能缺失的重要醫(yī)療器具,其分類體系基于解剖學(xué)特征�����、功能需求及控制技術(shù)����,形成了嚴(yán)謹(jǐn)?shù)目茖W(xué)框架�。以下從多維度解析其分類邏輯與技術(shù)特點:
一、按截肢部位與解剖結(jié)構(gòu)分類
1. 手指/掌部假肢
針對指骨或掌骨缺失設(shè)計�,多采用硅膠或樹脂材料模擬外觀,部分高端產(chǎn)品通過微型關(guān)節(jié)實現(xiàn)指間關(guān)節(jié)的被動屈伸���,適用于保留部分掌骨功能的患者�。例如���,3D打印定制的掌指關(guān)節(jié)假肢可精準(zhǔn)匹配殘端骨結(jié)構(gòu)��,提升抓握時的力學(xué)傳導(dǎo)效率����。
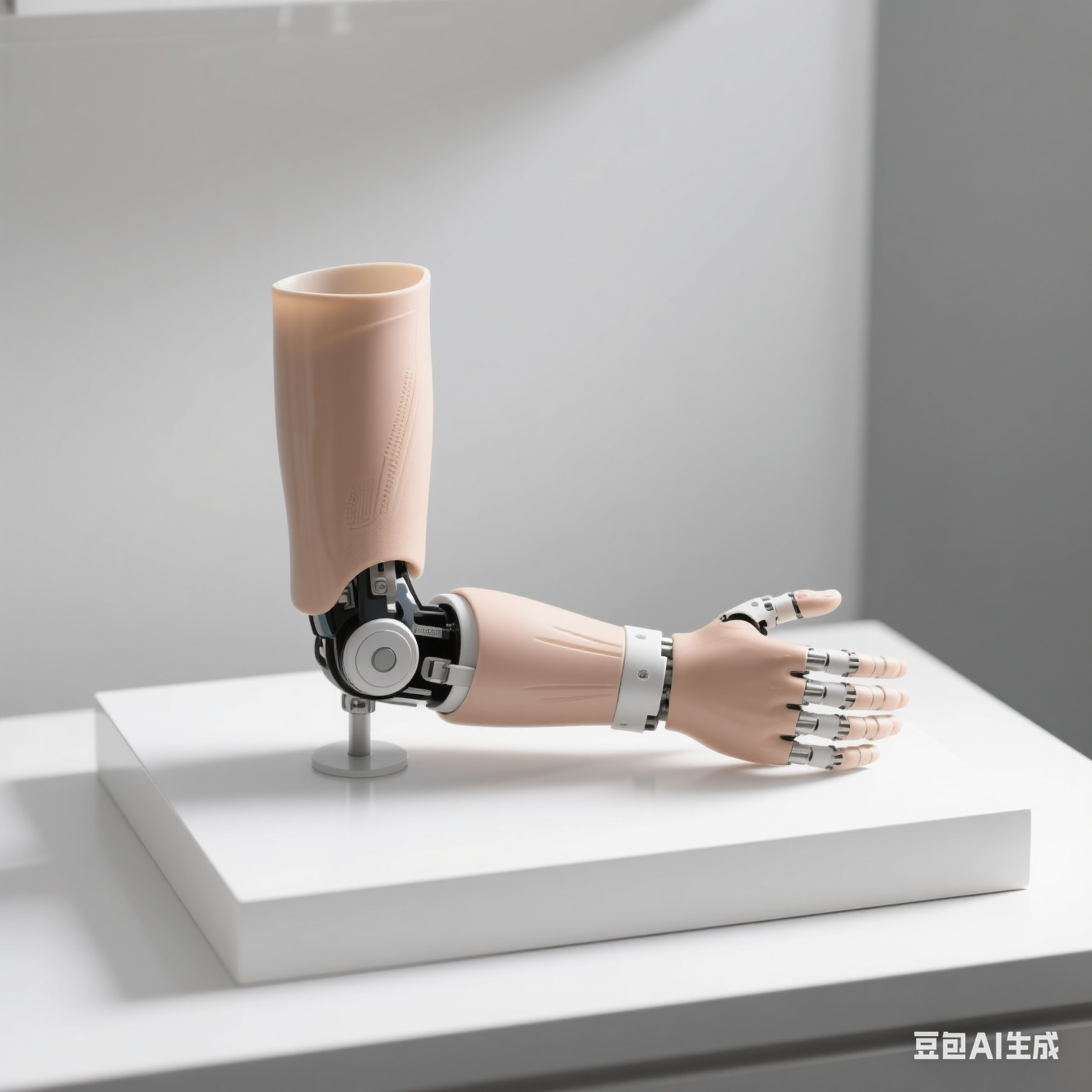
2. 腕部及前臂假肢
覆蓋腕關(guān)節(jié)至肘關(guān)節(jié)以下的截肢部位,核心在于模擬前臂旋轉(zhuǎn)與手部抓握功能��。傳統(tǒng)機(jī)械假肢通過繩索牽引實現(xiàn)開合��,而現(xiàn)代肌電假肢則利用前臂殘肢肌肉(如肱橈肌���、尺側(cè)腕屈?。┑碾娦盘柨刂萍偈謩幼?���,抓握力可達(dá)3-5kg。
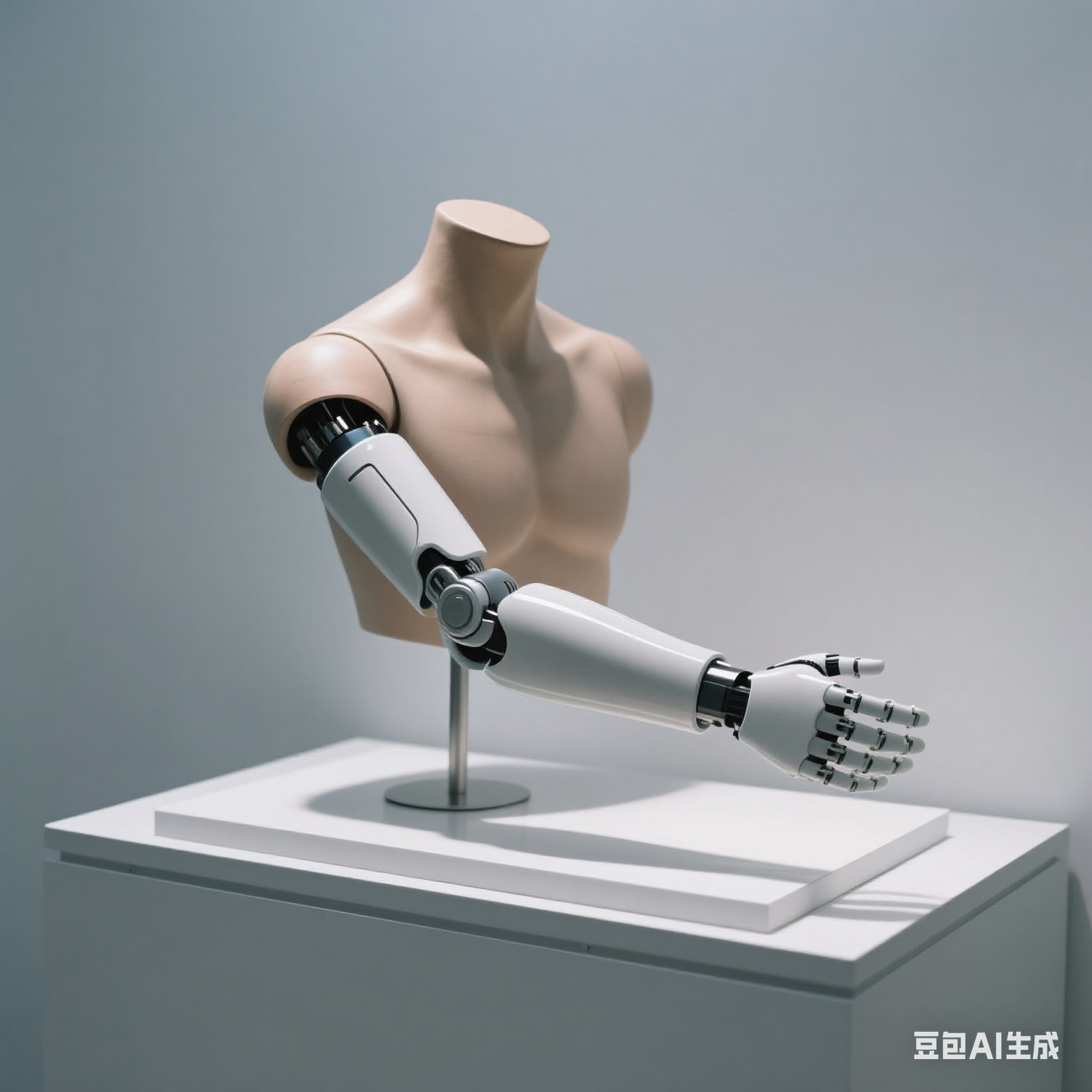
3. 上臂及肩離斷假肢
針對肘關(guān)節(jié)以上至肩部的截肢�����,需解決肩關(guān)節(jié)活動與多自由度控制問題��。肩離斷假肢通常采用肩帶懸吊系統(tǒng)�����,配合胸背肌電信號控制肘關(guān)節(jié)屈伸及假手動作�����,高端產(chǎn)品可通過肩胛骨運(yùn)動傳感器實現(xiàn)肩部外展等復(fù)合動作。

二�����、按功能與應(yīng)用場景分類
1. 裝飾性假肢
以仿生外觀為核心����,采用硅膠表皮模擬膚色與紋理����,內(nèi)部為輕量化樹脂框架。雖功能有限�����,但通過3D掃描定制可實現(xiàn)毫米級外觀匹配�����,常用于社交場景或?qū)γ烙^要求高的患者����。
2. 功能性假肢
側(cè)重實用操作能力���,分為:
- 身體動力型:通過肩背運(yùn)動牽引鋼索驅(qū)動假手,結(jié)構(gòu)簡單但需頻繁肢體聯(lián)動�,適合日常輕量操作;
- 肌電控制型:利用表面電極采集肌肉電信號�����,經(jīng)放大器轉(zhuǎn)化為電機(jī)動作����,可實現(xiàn)捏、握��、旋等20余種動作模式�,典型如 Ottobock Michelangelo 假手,抓握精度可達(dá)0.5mm���。
3. 運(yùn)動與職業(yè)專用假肢
- 運(yùn)動假肢采用碳纖維骨架與彈性儲能結(jié)構(gòu)����,如攀巖專用假肢的鉤狀末端可承受150kg拉力�����;
- 工業(yè)假肢集成力反饋傳感器,可在裝配作業(yè)中感知物件重量與壓力���,避免過載損傷�。
三�����、按控制技術(shù)與智能化程度分類
1. 機(jī)械被動控制
依賴關(guān)節(jié)阻尼或彈簧實現(xiàn)被動運(yùn)動����,如被動式肘關(guān)節(jié)僅能在預(yù)設(shè)角度鎖定�,適用于殘肢運(yùn)動功能極弱的患者。
2. 肌電與神經(jīng)接口控制
- 表面肌電技術(shù)已發(fā)展至多通道實時控制����,新型干電極可直接貼合皮膚,無需導(dǎo)電凝膠���;
- 侵入式神經(jīng)接口(如靶向肌肉神經(jīng)再支配術(shù)���,TMR)通過將殘肢神經(jīng)與替代肌肉連接,使患者可直接“意念控制”假肢��,目前已實現(xiàn)50+自由度的精細(xì)動作。
3. 智能集成系統(tǒng)
部分高端假肢嵌入AI算法�����,如通過慣性傳感器識別手勢意圖�,結(jié)合云端數(shù)據(jù)優(yōu)化動作模式;腦機(jī)接口實驗性產(chǎn)品已實現(xiàn)通過腦電信號(EEG)直接控制假肢�����,延遲時間<50ms�。
四、材料與制造技術(shù)革新
傳統(tǒng)假肢多采用鋁合金或工程塑料����,現(xiàn)代產(chǎn)品則普及碳纖維復(fù)合材料(強(qiáng)度重量比提升3倍)與柔性硅膠。3D打印技術(shù)實現(xiàn)了殘肢個性化適配�����,如SLS激光燒結(jié)工藝可制造孔隙率達(dá)40%的輕量化接受腔����,兼顧透氣性與支撐力。
未來,隨著神經(jīng)工程與柔性電子技術(shù)的突破��,上肢假肢正向“生物-機(jī)械融合”方向發(fā)展��,目標(biāo)是實現(xiàn)與健側(cè)肢體等同的運(yùn)動精度與觸覺反饋��。
本文科普內(nèi)容與圖片均由豆包AI(2025年6月25日生成)提供支持
